写在前面
参考资料
- TI毫米波入门文档:The fundamentals of millimeter wave radar sensors
- 为什么在毫米波雷达中使用复基带信号:Using a complex-baseband architecture in FMCW radar systems
- 通信原理-角度调制I by 张锦皓Roger:通信原理 主讲:张锦皓
毫米波信号的表示
阅读很多论文,我发现非常多的文章都采用了复中频信号表示,例如载波频率为,斜率为 的毫米波雷达,距离为的物体产生的回波信号可以表示为。当然,TI的毫米波雷达也确实是这么做的,原因可以参考TI的文章,大概可以概括为:复基带信号可以将FFT后的功率都变换到正频率边带上,方便处理、更加抗干扰。
但是这篇文章仍将使用传统的三角函数表示方式。只取实中频信号,无论如何仍旧是可行的,且更方便理解。如上面的回波信号,我们会写成
复边带信号的虚部就是将实部向后推个周期,我们可以很容易通过欧拉公式得到这个结论。
虚部的sin,可不就只与实部差1/4个周期吗?
(乘法)混频器的工作原理
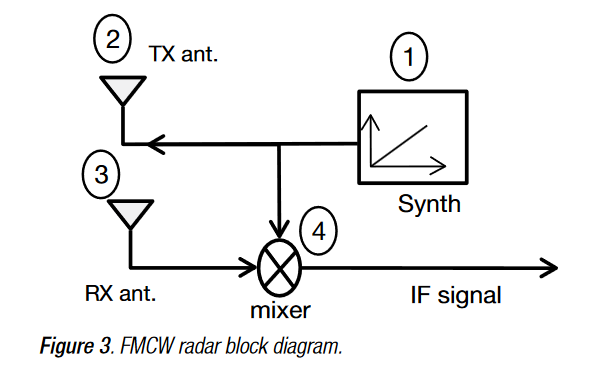
之前阅读TI毫米波入门文档时,差频信号的产生依赖于发射(TX)信号与经过物体反射回到毫米波雷达的接收(RX)信号。假设发射信号和接收信号分别为与:
那么产生的差频信号就是:
当时对于射频知识一无所知的我认为:混频器是一个超级高大上的器件,毫米波的频率有几十个GHz,怎么能做到实时处理如此高频的信号的?
当然,我现在已经知道,混频器,其实可以由一个乘法器+一个滤波器来进行实现。也就是将其两个输入的瞬时值直接相乘,再滤波,就能得到中频信号了。具体的数学推导也很简单,可以直接利用三角函数积化合差公式。
三角函数积化合差公式(之一):
因此:
我们可以看到,我们需要的中频信号已经得到了。只需将乘法器的结果通过一个低通滤波器,将频率成分滤掉,保留就行了。
在TI文档上展示的混频器如下图中的mixer所示:
FMCW雷达中频信号的推导
调幅与调角
假设载波信号的表达式为:
通过改变载波信号幅度的调制方式,称作调幅:
通过改变相位的调制方式,称为调角:
调频与调相,都是调角的一种。
瞬时相位与瞬时角频率
所谓“瞬时”,指的是特定的时刻,载波信号的状态。
瞬时相位就是把cos表达式括号内的表达式直接拿出来。例如:的瞬时相位就是。瞬时相位就是信号已经经过的周期数乘以。
瞬时角频率(也许可以叫瞬时角速度)就是瞬时相位对时间的导数。在调频的情况下:不是时间的函数,则瞬时角频率等于载波频率;在调角的情况下,是时间的函数,则瞬时角频率等于载波频率加上调角带来的瞬时角频偏。
可以将信号看作一个圆周运动物体的轨迹,是角速度,是初始位置与0角度参考线(极坐标中的极轴)的夹角。瞬时相位就是物体的当前位置,而瞬时角频率则是瞬时角速度。
调相与调频
调相与调频都属于调角,区别在于基带信号与瞬时相位差之间的关系。
调相信号的瞬时相位差与基带信号具有正比例关系,即,其中常数称为相移常数。调相信号的表达式为:
调频信号的瞬时角频偏与基带信号具有正比例关系,即,其中常数称为频偏常数。调相信号的表达式为:
FMCW雷达的载波
FMCW雷达采用调频技术,频率随时间线性变化。这里的频率可以认为是瞬时角频率。
由于载波频率是常数(在TI的设备上一般是60GHz或77GHz),因此:随时间线性变化。假设FMCW雷达的频率(角速度)对时间的斜率为,即:。
记我们就可以利用积分算出瞬时相位:
因此,我们可以得到FMCW载波的最终表达式:。
我们已经知道了瞬时频率与时间的变化关系是线性的,我们当然可以认为载波频率是一个随时间变化的量,这样一来FMCW载波的表达式就变为。这也能得到只差一个系数的正确结果。
但是,当我们想要把一个任意的基带信号以调频方式加载到载波上时,我们不能简单地直接把基带信号加在载波频率上,例如:。这样求出的瞬时频偏不会等于,会得到不正确的结果。
中频信号的推导
调频连续波信号的返回信号是发射信号的延时信号。延时时间,为反射物与雷达的距离。因此:
发射信号:
接收信号:
中频信号是二者的混频,由前面得到的积化和差公式,加上低通滤波可得:
由于非常小,因此可以忽略关于的高阶小量,中频信号的最终表达式为:
与TI文档给出的中频信号表达式相比:
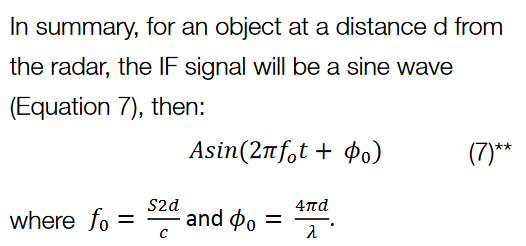
其中,,。由于波速除以频率等于波长,即,故。完全一致,推导完成!